







Description
There is increasing competitive pressure on the industrial market. Higher efficiency in production is required to reduce cost and to increase quality. Allowing robot programming to add time to the manufacturing start of new products is unacceptable today as is shutting down ongoing production to program new or modified parts.
Taking the risk of manufacturing tooling and fixtures without first verifying reach and accessibility is no longer an option. The modern production site verifies the manufacturability of new parts during the design phase. When programming your robots offline, programming can take place in parallel with the system build.
By programming the system at the same time as it is manufactured, production can start earlier, reducing time-to-market. Offline programming reduces system risk by visualizing and confirming solutions and layouts before the actual robot is installed and generates higher part quality through the creation of more accurate paths.
RobotStudio is an engineering tool for configuration and programming of ABB robots, both real robots on the shop floor and virtual robots in a PC. To achieve true offline programming, RobotStudio utilizes ABB VirtualRobot™ Technology.
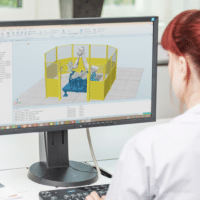
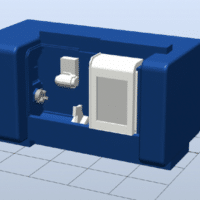
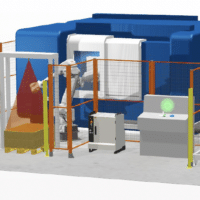
3D import and modeling
RobotStudio can import CAD data in a number of formats. With the available layout functions you can position your parts the way you want. Using Mechanism Modeler, you can model your own tracks, tools or grippers for use in RobotStudio simulations.
Smart components
Smart Components offers a way of creating simulations by adding behavior to the simulated objects. It brings life to the graphical component libraries by the addition of so-called Base Smart Components for basic motion, signal logic, arithmetic, parametric modeling, sensors and so on.
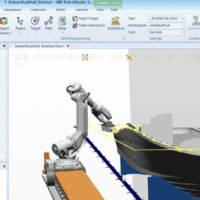
AutoPath and AutoConfiguration
By using a CAD-model of the part to be processed it is possible to automatically generate the robot positions needed to follow a curve or edge of the geometry. The AutoConfiguration feature helps you to automatically define the robot arm configuration for a complete path.
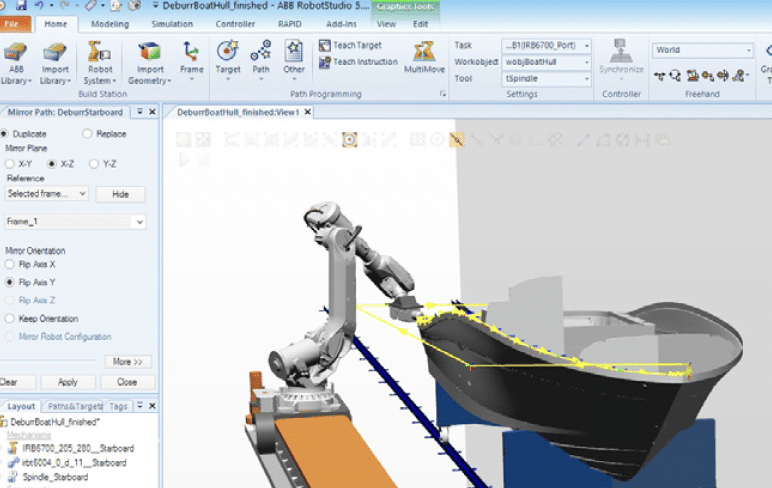
Path tools
Tools are available to tune an entire path. You can smooth out the orientation, reposition and mirror the path to get the robot to do exactly what you want. You can compensate the path for the radius of the tooling used.
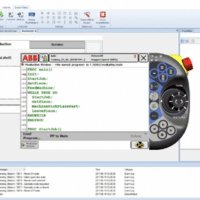
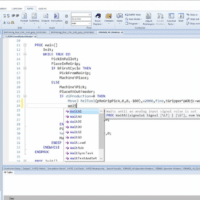
Robot program editing and debugging
The integrated robot program text editor allows you to view and edit programs loaded into your robot, either real or virtual. Its features include syntax and error highlighting, tooltips, automatic insertion of arguments, and context-sensitive help for robot instructions. There is a data editor that allows tabular editing of program data. You can debug the program by setting breakpoints, step through the program and watch variable values.
Jobs
The Jobs feature lets you operate on a large population of IRC5 controllers in the plant. There are several actions that can be carried out by the Jobs function, for example, do a backup, synchronize the time of your robots, read RAPID data, get system information and much, much more.
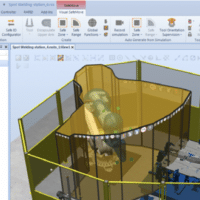
Visual SafeMove
Visual SafeMove is a 3D based configuration tool for SafeMove. The configuration tool allows safety zones to be configured and visualized using the 3D graphics view. It is part of the Basic edition which means it is free of charge. It works for both real and virtual robots.
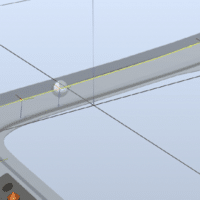
TrueMove™ Path Visualization
The IRC5 controller features TrueMove that provides outstanding path following capabilities. When working with an ABB robot you can be confident that the robot will always follow the programmed path regardless of the programmed speed. In RobotStudio, the programmed path will be visualized to show exactly how the robot will move.
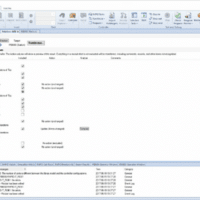
Signal Analyzer
The Signal Analyzer records and displays signals from a robot controller which makes it possible to optimize the robot program. For example, you can record robot speed, power consumption, I/O signals, TCP and joint values. Signal recordings can be exported to Excel for further analysis.
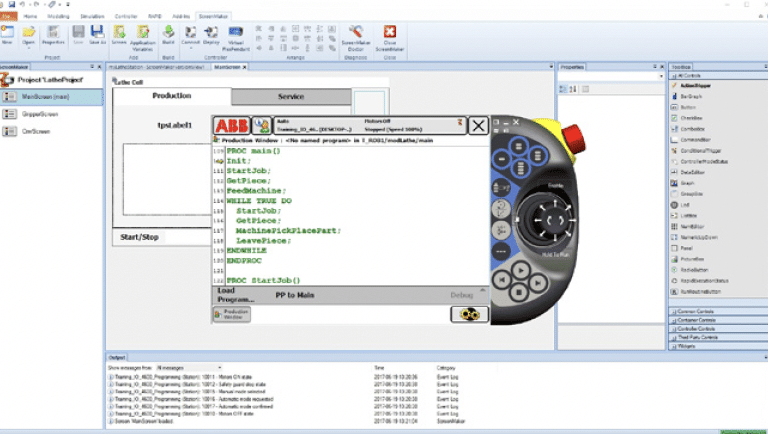
Virtual FlexPendant and ScreenMaker
The Virtual FlexPendant allows you to control and monitor the virtual controller in the same way as the real controller. You can for example use it to preview user screens created with Screen-Maker which is a tool in RobotStudio for developing FlexPendant user screens without the need to learn the Visual Studio development environment and .NET programming.
Visualization
The DirectX 11 based 3D graphics engine in RobotStudio enables the user to customize the light setup by adding and tuning the light sources available: ambient light, infinite light, spotlight and point light. The shadows cast by the objects in combination with the built-in material library gives a realistic touch to the visualization of your result. In addition, you can define view points and create markups.
Station Viewer
RobotStudio can create a 3D interactive movie packaged in a standalone executable for showing and sharing a RobotStudio simulation to others that do not have RobotStudio installed. During replay, the speed can be adjusted to run faster or slower than real-time. A slider can be used to jump directly to the simulation highlights.
Transfer
The transfer function allows easy transfer of offline-created robot programs to the real robot on the shop floor. This means that you can transfer data from a virtual controller (which is offline) to a real controller (which is online). You can also compare the programs of the real and virtual controllers.
PowerPacs
A PowerPac is an optional addition to RobotStudio for certain application specific tasks.
Specifications
- Operating System: Windows 7 (32 or 64-bit) or Windows 10 (64-bit)
- CPU: 2.0 GHz or faster processor, multiple cores recommended
- Memory: 3 GB if running Windows 32 bit edition8 GB if running Windows 64 bit edition. 16GB or more is recommended when working with large CAD models.
- Graphics Card: High-performance DirectX 11 compatible graphics card.
For the Advanced lightning mode Direct3D feature level 10_1 or higher is required. - Screen Resolution: 1920 x 1080 pixels or higher is recommended
- DPI: Normal size (100 % / 96 dpi) up to Large size (150 % / 144 dpi)
- Mouse: Three-button mouse
- 3D Mouse (optional): Any 3D mouse from 3DConnexion, see www.3dconnexion.com
- Touchscreen (optional): Touch is enabled for Windows Multitouch screens